LaVision’sFlowMaster PIVsystems can be used for 2D and stereoscopic flow field analysis.FlowMaster 2Dmeasures two velocity components in a plane (2D2C) with one camera.FlowMaster Stereo-PIVis a straightforward extension of theFlowMaster 2Dconcept and enables the measurement of all three velocity components inside a light sheet (2D3C) using two cameras. Stereo-PIV is based on the principle of stereoscopic imaging: two cameras are arranged to image the illuminated flow particles from different perspectives and Scheimpflug lens arrangements keep both image planes in focus. The combination of both camera projections allows the reconstruction of the true 2D3C-particle displacement inside the measurement area.
For Stereo-PIV LaVision has developed a unique and patented camera calibration method. This so-calledSelf-Calibrationmethod uses the original particle images of both cameras to correct even large misalignments between calibration plate and laser light sheet. LaVision’sSelf-Calibrationmethod is a standard feature of the Stereo-PIV software inDaVis.
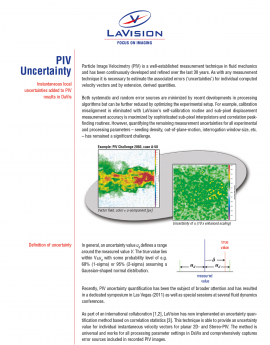
As with all measurement techniques, it is important for PIV to estimate the associated errors (uncertainties) for individual computed velocity vectors as well as for derived quantities. To date, the best approach for uncertainty quantification of PIV data is based on theCorrelation Statisticsmethod as applied in ourDaVisPIV software package. This additional uncertainty information can be used to optimize PIV parameter settings and as a guide for a post-processing filter for denoising PIV images without losing relevant flow information.
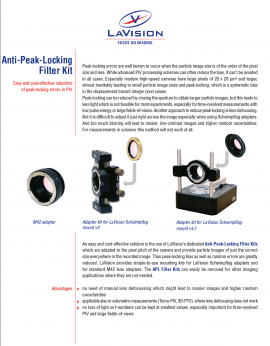
Among other experimental parameters like seeding density, out of plane motion and interrogation window sizePeak-Lockingis one factor affecting PIV uncertainty.Peak-Lockingoccurs when the particle image size is of the order of the pixel size of the sensor causing a bias error of the correlation peak toward integer pixel values. To minimize this effect LaVision offers anAnti-Peak-Locking Filterplaced between camera and lens.

 公司新闻
公司新闻