FlowMaster 层析PIV(Tomo PIV)
FlowMaster Tomographic (Tomo) PIV is an extension of the FlowMaster Stereo-PIVconcept and enables the instantaneous measurement of all three velocity components in a complete 3D measurement volume (3D3C).
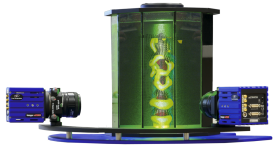
FlowMaster Tomo-PIV systems use the same laser and camera equipment as in planar PIV setups, i. e. a direct migration from 2D- or Stereo-PIV to Tomo-PIV is straightforward best adding one or two cameras.
Tomo-PIV is based on the principle of tomographic reconstruction of voxel intensities in a volume (MART) that is well known from Computed Tomography (CT) in medical imaging. For accurate voxel reconstruction all cameras must be mapped in space into the same coordinate system with an accuracy of better than 0.1 pixel. This highly accurate camera calibration is realized using our patented Volume Self-Calibrationmethod in DaVis.
Finally 3D-velocity vector maps from two 3D particle images are computed applying an iterative three-dimensional cross-correlation technique using deformed interrogation volumes.
**FlowMaster 三维体视 PIV(Tomographic PIV)**
FlowMaster **Tomographic(Tomo)PIV** 是 FlowMaster **双目立体 PIV(Stereo-PIV)** 概念的扩展,可实现**完整三维测量体积内的瞬时三维速度分量测量(3D3C)**。
FlowMaster Tomo-PIV 系统使用的激光与相机设备与平面 PIV(2D 或 Stereo-PIV)系统相同,因此从二维或立体 PIV 升级到 Tomo-PIV 十分便捷,只需额外增加一到两台相机即可。
Tomo-PIV 的原理基于对体积内**体素(voxel)强度的层析重建**,与医学影像中的 **CT(Computed Tomography,计算机断层成像)** 技术类似。
为了实现精确的体素重建,所有相机必须在空间中被映射到**同一坐标系**中,且精度需优于 **0.1 个像素**。
这种高精度的相机标定通过 **DaVis 软件中专利的“体积自标定(Volume Self-Calibration)”** 方法实现。
最终,通过对两帧三维粒子图像应用**三维迭代互相关算法(iterative 3D cross-correlation)**,并使用形变的 interrogation volume(相关区域体积)进行计算,得到完整的 **三维速度矢量场**。

 公司新闻
公司新闻